一、需要准备的东西
1.图像识别
(1)车道线检测
深度学习笔记(十二)车道线检测 LaneNet - xuanyuyt - 博客园 (cnblogs.com)
2.模型预测
采用了基于车道线距离阈值来计算换道数据的算法。 [1]
基于改进动态窗口法的轨迹预测方法。 [1]
基于动态车辆运动预测的速度规划方法。 [1]
该方法将速度规划与路径规划解耦以降低计算复杂度,即先得到最优路径,然后根据动态车辆的行驶轨迹得到最优路径上的期望速度。
3.仿真验证
实验仿真平台采用的是 Prescan 8.0 和 Matlab R2015b。 [1]
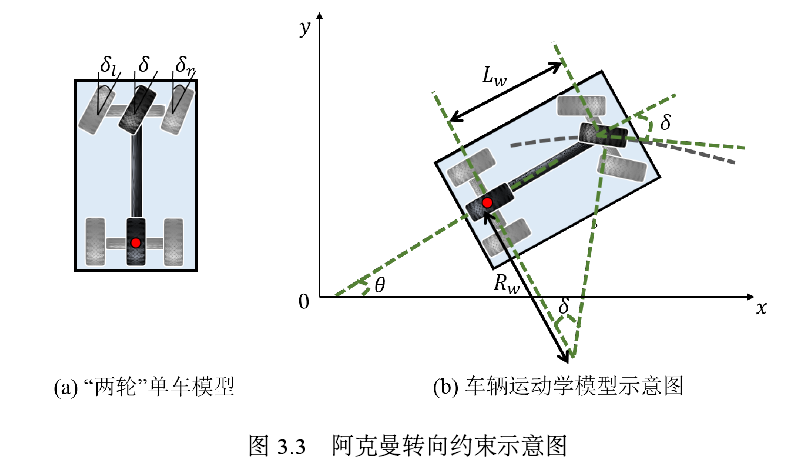
1.基于阿克曼转向约束的改进动态窗口法。 [1]
2.交互行为建模 [1]
关心区域如公式 (3.9) 所示。

将关心区域内的其他车辆的交互影响分为合作型交互与干扰型交互(干扰属于博弈的一种类型)。交互影响通过判断关心区域内的其他车辆与预测车辆的意图关系和相对位置来确定(如图3.6所示)。
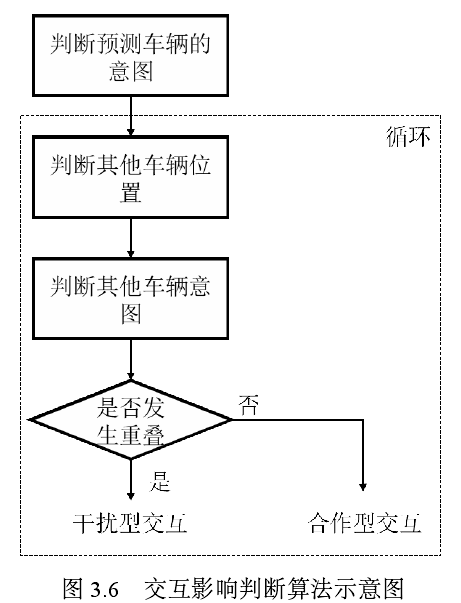
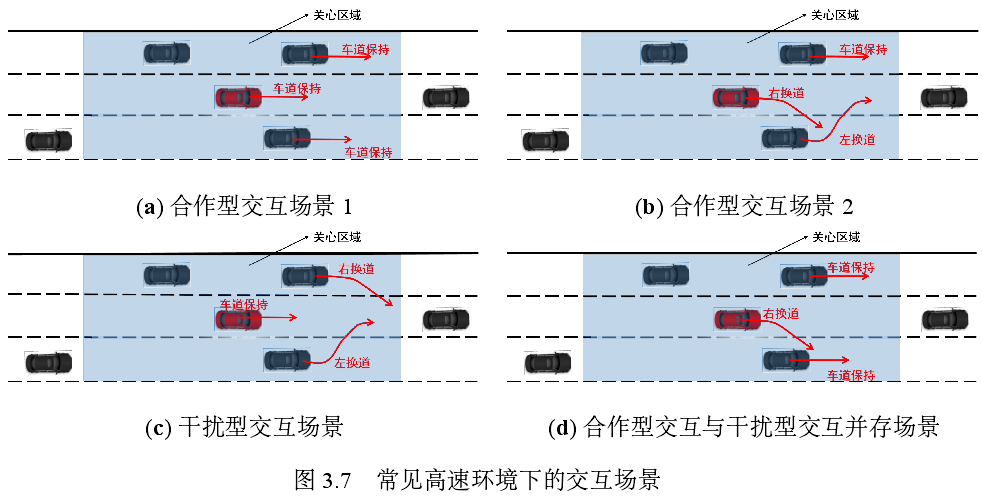
如果关心区域内的其他车辆的意图所产生的行为可能占领预测车辆的意图空间,则认为是干扰型交互。如果没有发生上述空间的冲突,则认为是合作型交互。常见的交互场景如图3.7所示。
4.碰撞分类
(1)事故预测 [2]
事故预测问题可以表述为一个二元分类问题,其中正类是事故发生的情况,负类是给定道路在给定日期和时间未发生事故的情况。
(2)高速公路行车风险产生影响 [3]
对高速公路行车风险产生影响的主要因素包括3类:事故预测问题可以表述为一个二元分类问题,其中正类是事故发生的情况,负类是给定道路在给定日期和时间未发生事故的情况。
第1类为道路设计指标,包括道路平面曲率、路面横坡、路面纵坡。
第2类为车流运行指标,包括运行车速、车速波幅、交通量。
第3类为路面性能指标,包括路面摩擦系数。
将这7个因素作为高速公路行车风险评估指标。
5.有用的信息
(1)与车辆物理状态有关的特征 [1]
与其他特征不同,与车辆物理状态有关的特征(除了VC节点外)会随着时间的变化而发生改变,并且会形成跨时间片段的因果间推理。这些特征包括以下节点。
• VC:表示车辆的种类,该特征的状态包括摩托车、卡车和汽车。VC 被放置在证据层中,因为其作为预测行为的辅助依据时,不会随时间改变。
• TI/BI:表示转向灯 / 刹车灯的状态,包括开、关。
• LO:表示动态车辆横向速度的方向。
• YA:表示动态车辆与道路中心线的切向角。
• BO:表示动态车辆距离车道两旁的车道线的距离。
(2)与道路结构有关的特征 [1]
与道路结构有关的特征往往决定着意图的可行性,同时还影响着动态车辆的交互行为,但这些特征不会形成跨时间片段的因果推理。这些特征包括以下节点。
• LLE:表示动态车辆左侧是否存在车道。
• RLE:表示动态车辆右侧是否存在车道。
• LCU:表示动态车辆所在车道的道路曲率。道路曲率是影响车辆意图的条件之一。
(3)与多车交互有关的特征 [1]
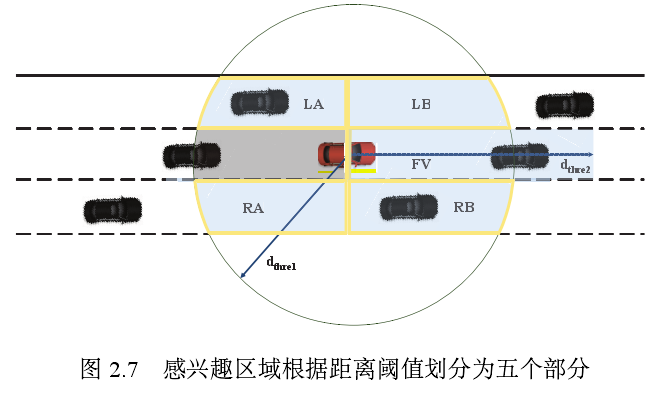
车辆驾驶意图通常受到周围车辆交互行为的影响,考虑的周围车辆是指感兴趣区域内的车辆,感兴趣区域的设计如图2.7所示,并假设动态车辆的意图不受其同一车道中后方跟随车辆的影响。本节根据动态车辆与周围车辆的间距和相对速度的关系来建模多车交互行为的特征。由于相邻车辆存在的先决条件是相邻车道存在,因此与多车交互有关的特征还与 LLE、RLE 有关。与多车交互有关的特征包括以下节点。
• LBRV:表示动态车辆感兴趣区域内左车道前方车辆交互关系,包括其他车辆是否存在、其他车辆相对动态车辆的速度。
• LARV:表示动态车辆感兴趣区域内左车道后方车辆交互关系。
• RBRV:表示动态车辆感兴趣区域内右车道前方车辆交互关系。
• RARV:表示动态车辆感兴趣区域内右车道后方车辆交互关系。
• FVRV:表示动态车辆感兴趣区域内相同车道前方车辆交互关系。
我的想法:
碰撞可以分为三类:碰撞,接近碰撞,没有碰撞
车辆与车辆之间的关系:侧面接近,前后碰撞
车辆的属性:车辆的属性(小轿车,大卡车)
道路的属性:直道,弯道(有偏向角)
二、数据集
1.实验采用美国联邦公路管理局提供的公开数据集NGSIM I-80和 NGSIM US-101(下载地址),这些数据集已被广泛用于智能交通系统和车辆运动预测算法的验证中。 [1] (数据只是车辆运动预测,没有碰撞数据)
2.一个包含道路车辆碰撞的数据集、一个描述加拿大道路网络的数据集和一个包含历史天气信息的数据集。 [2]
(除了代码没有一个数据是能下载下来的,代码还看不懂/(ㄒoㄒ)/~~)
数据特征通常包括道路信息,如车道数、平均每日交通流量、道路曲率,以及天气信息,如平均降水和温度。
交通事故是非常罕见的事件,所以我们有更多的没有事故的例子,而不是有事故的例子。机器学习算法通常很难从不平衡数据集学习。抽样方法包括对数据集进行重新抽样,以使其平衡,要么对少数类进行过度抽样,要么对多数类进行欠抽样,或者两者同时进行。
三、扫盲
数据集有一些相关的知识基本不了解扫盲-数据不平衡
挺有意思的文章,有时间可以看看钟形曲线(正态分布bell curve) (360doc.com)
参考文献
【1】 李峻翔.无人车规划及车辆运动预测研究[D].导师:戴斌.国防科技大学,2019(博士论文)
【2】 Jaumard G. High-Resolution Road Vehicle Collision Prediction for the City of Montreal[J]. 2019. (蒙特利尔市高分辨率道路车辆碰撞预测,2019,IEEE)
【3】邱磊,叱干都,邓志刚,刘建蓓,马小龙.基于影响系数的高速公路行车风险评估模型[J].公路交通科技,2020,37(03):123-129.

